
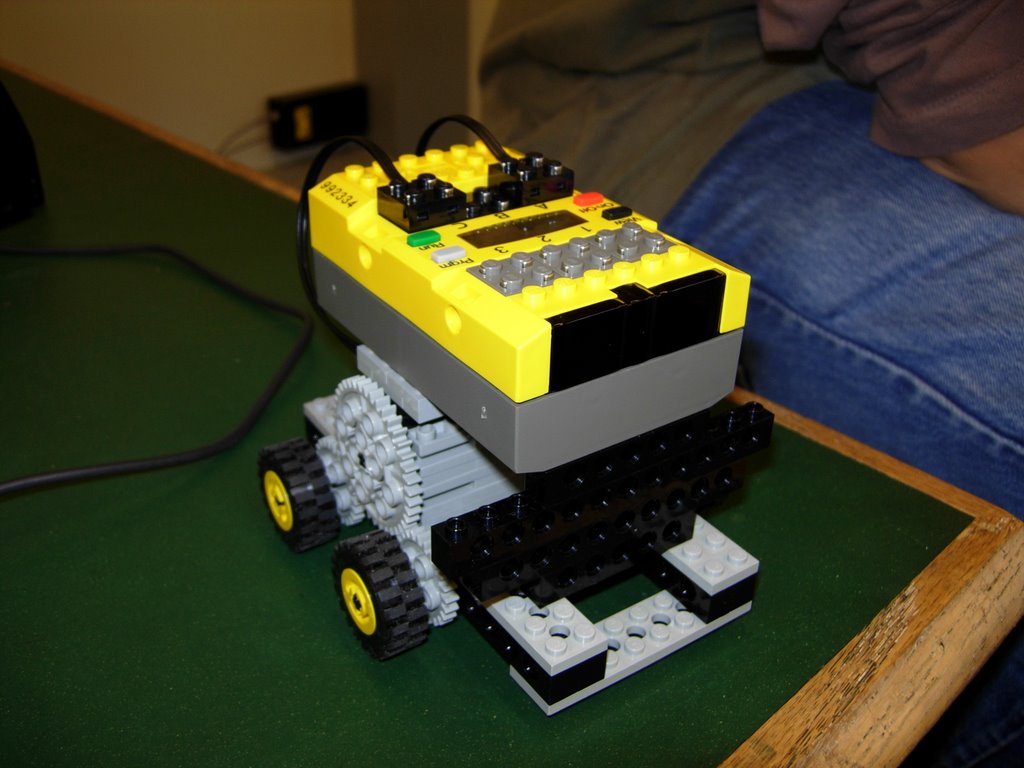
 One course I have been looking forward to for a while is COGS300. In the lab part of the course we get to play with Lego Mindstorm. Each team works on a robot, and then we compete them against each other. There are a total of three challenges. The first task is to navigate through a maze without any sensors or interaction with the environment. The second task is to navigate through the same maze using sensors. The third task will have something to do with the robots interacting with each other (BattleBots?). My team is currently working on the first task. We started with a tank design, but the friction on the treads turned out to be too inconsistent so we switched to wheels instead. So far we have made it about a third of the way through the maze.
One course I have been looking forward to for a while is COGS300. In the lab part of the course we get to play with Lego Mindstorm. Each team works on a robot, and then we compete them against each other. There are a total of three challenges. The first task is to navigate through a maze without any sensors or interaction with the environment. The second task is to navigate through the same maze using sensors. The third task will have something to do with the robots interacting with each other (BattleBots?). My team is currently working on the first task. We started with a tank design, but the friction on the treads turned out to be too inconsistent so we switched to wheels instead. So far we have made it about a third of the way through the maze.There was an Electronic Arts presentation on Tuesday, and a Google presentation today. Although both of them gave out prizes, I sadly returned without any. The EA talk was pretty straightforward, describing the company and the games that they develop. The Google presentation was a little more interesting, since they also went into a few examples which showed some of the neat stuff Google works on. I think the advertising for the Google event was a little too successful, since seats were filled and pizza was finished (I only got one slice). This was the third Google presentation that I have attended. After today's presentation I also decided that I will apply for a summer internship at Google. I’m sure it is VERY competitive to get an internship position there, so I won't get my hopes up.

// I find it interesting that the Blogger (owned by Google) spell checker does not have the word "Google" in its vocabulary.
2 comments:
>> The first task is to navigate through a maze without any sensors or interaction with the environment.
WTF? How can you navigate a maze without sensors? Are you trying to say that the maze is hard-coded into the robot? Is there someway for the robot to know about the outside world without the use of sensors?
Yes, the maze is hard-coded into the robot. This leads to problems since just a small mistake during the first part of the maze will make a huge difference towards the end. With our original tread design, after just three turns the robot would be heading in different directions every time we started again. After we switched to wheels, it seems that the battery level is going to be the main challenge in trying to keep the turns consistent.
Post a Comment